Autonomous Robot Engineering Physics Competition
Designing, building, programming an autonomous robot to navigate a course in the annual Engineering Physics Robot Competition
Context:
The annual UBC Engineering Physics Robot Competition allows students to build an autonomous robot from scratch. Each year a different theme or backstory characterizes the ultimate goal of the robots that are competing. The 2019 Robot Competition featured an Avengers theme - robots had to navigate the course head to head against another robot while trying to collect both infinity stones and avengers and return them safely to their side of the playing surface. The following UBC article further explains some of the backstory and competition context.
Learn More: UBC Engineering - Saving avengers at the 19th annual engineering physics robot competition Key Skills:- Rapid Prototyping
- Laser Cutter
- Waterjet Cutter
- Embedded C++ firmware
- CAD Design
- PID Control
- Circuit design
- SPI and serial communication
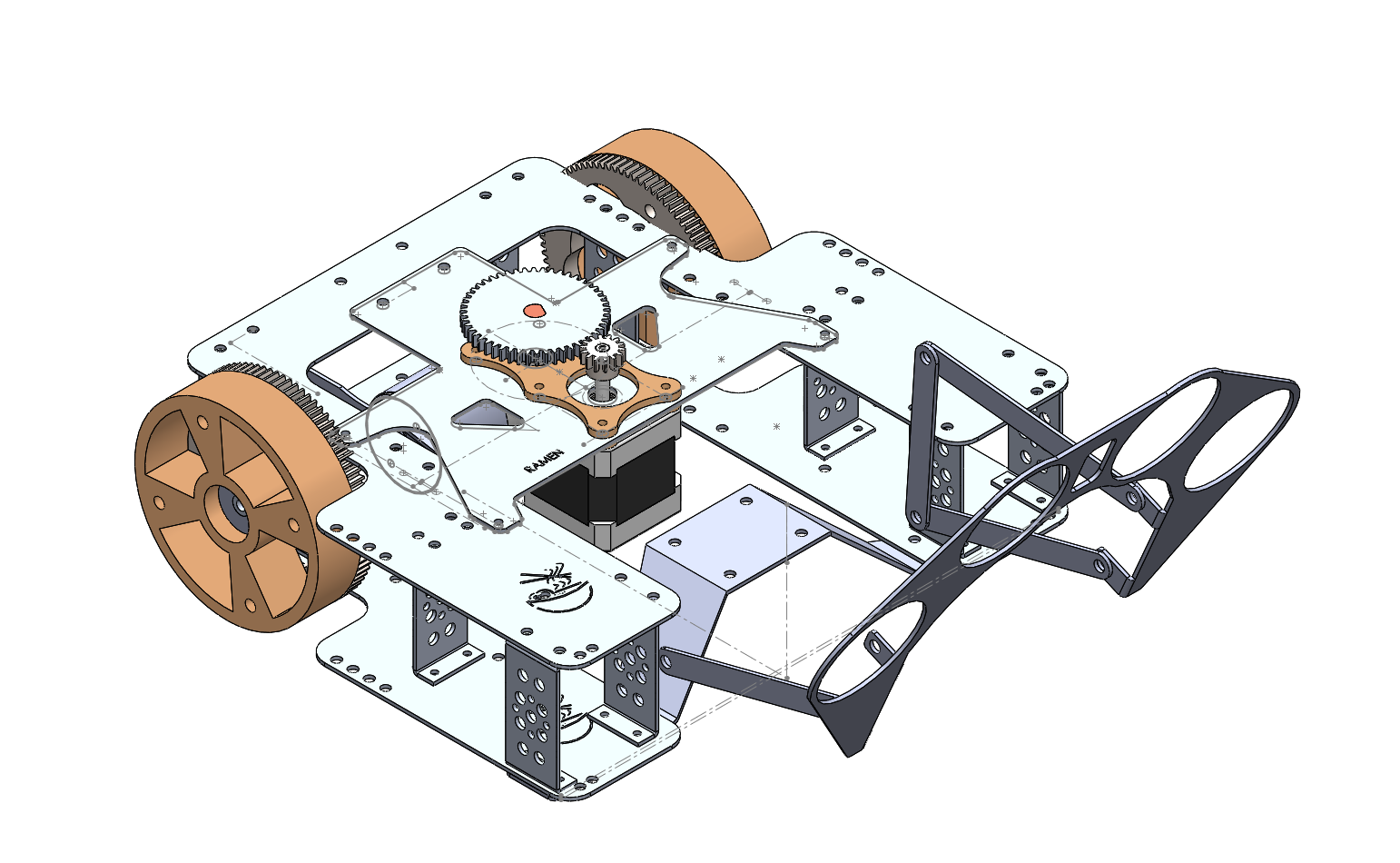
Final CAD
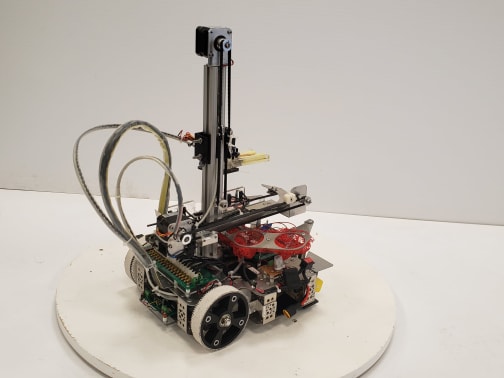
Complete Robot
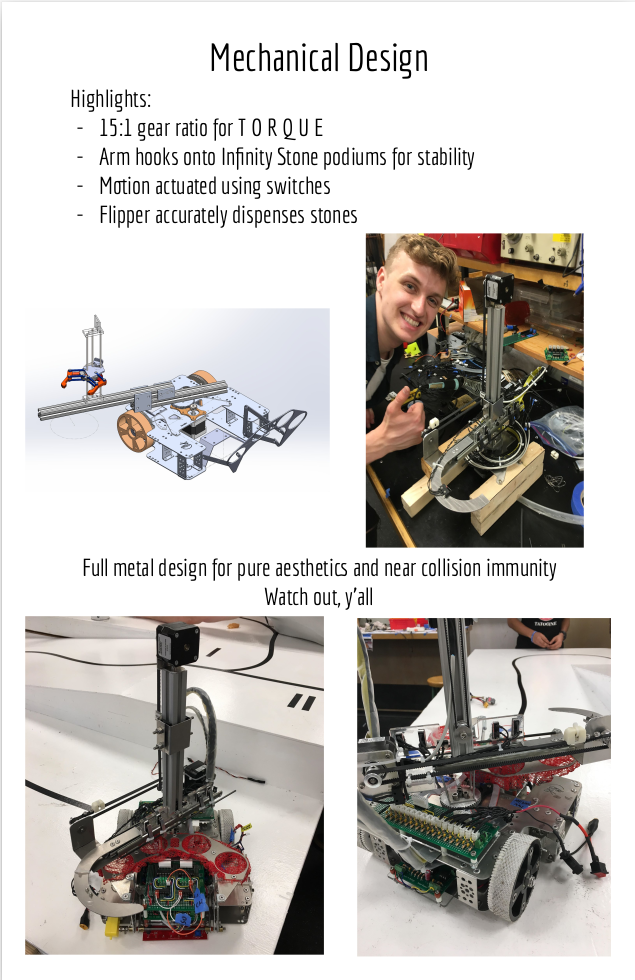
The Drive Train:
We had the fastest most controllable robot out of all groups, our design attempted to reduce the rotational moment of inertia and maximize the torque to allow the robot to be as controllable as possible. The drive train was a very difficult part of our design. we bought ungeared drill motors that had a very good power output. However, this came with the negative effect of requiring a massive gear ratio to achieve the torque required to drive up the incline and be controllable. Our gear ratio ends up being 14:1, this required a multi-stage drive that we built with water-jet ABS mounted on an aluminum bracket with lathed spindles. The first 2 prototypes had a lot of mechanical noise that was unreasonable so we spent a while rebuilding the drive train to get the desired performance.
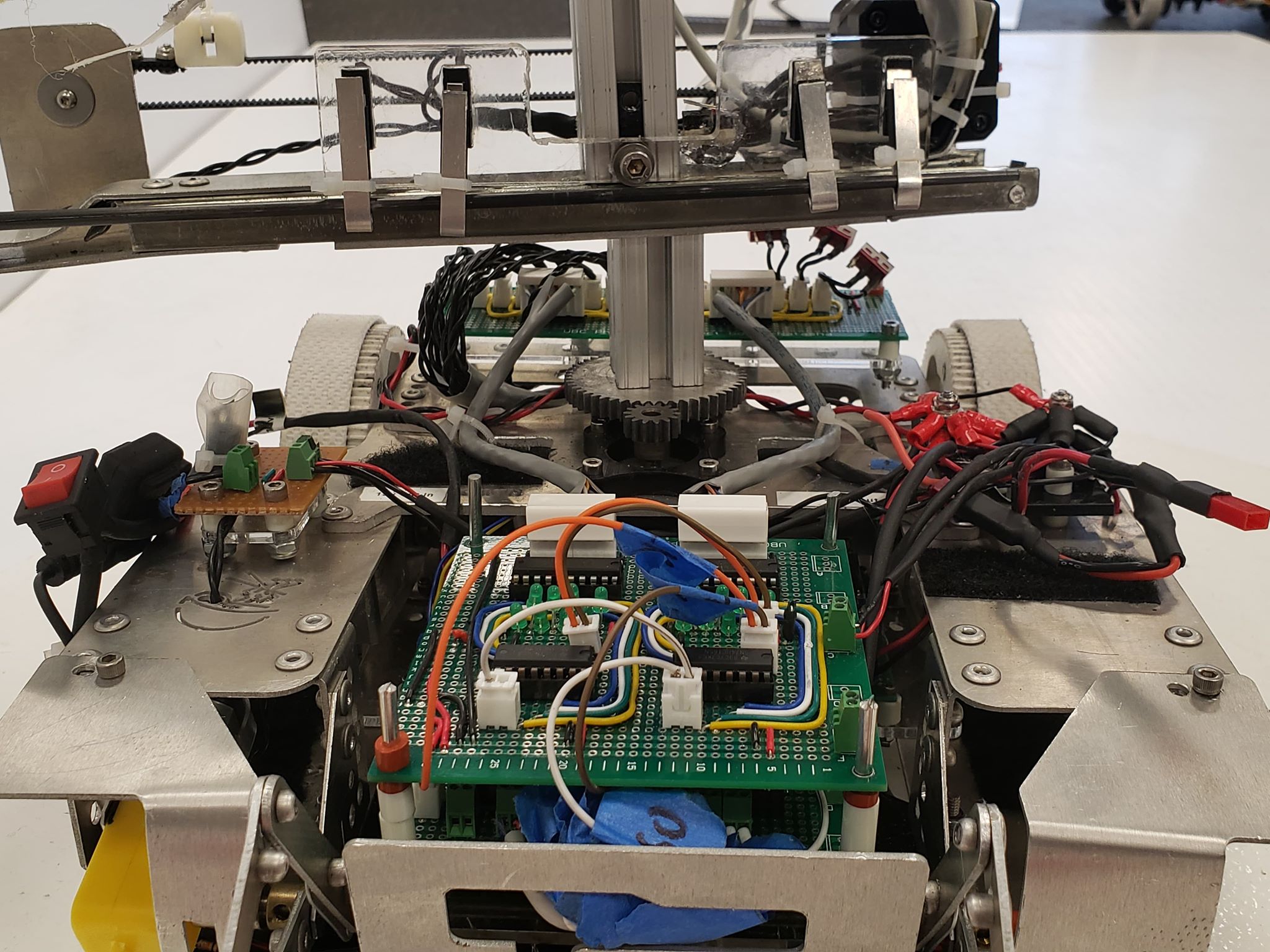
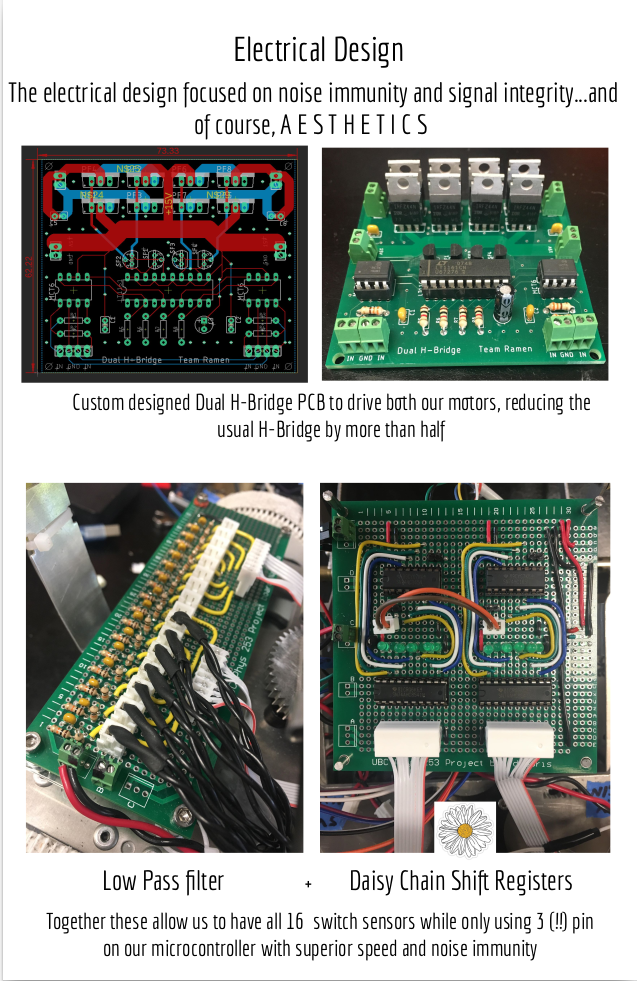
Serial Communication and Electrical Design:
We made the decision early on to base our design around serial communication more specifically SPI, we made this decision because we wanted a reliable way of handling many digital inputs without using all our microcontroller pins. This also came with the additional benefit of natural noise resistance. We designed our robot with purely digital instrumentation to avoid having to handle analog noise and allow our motion to be regulated by limit switch activations.
We built a PCB H bridge board, we were the only team to succesfully make a PCB in the competition.
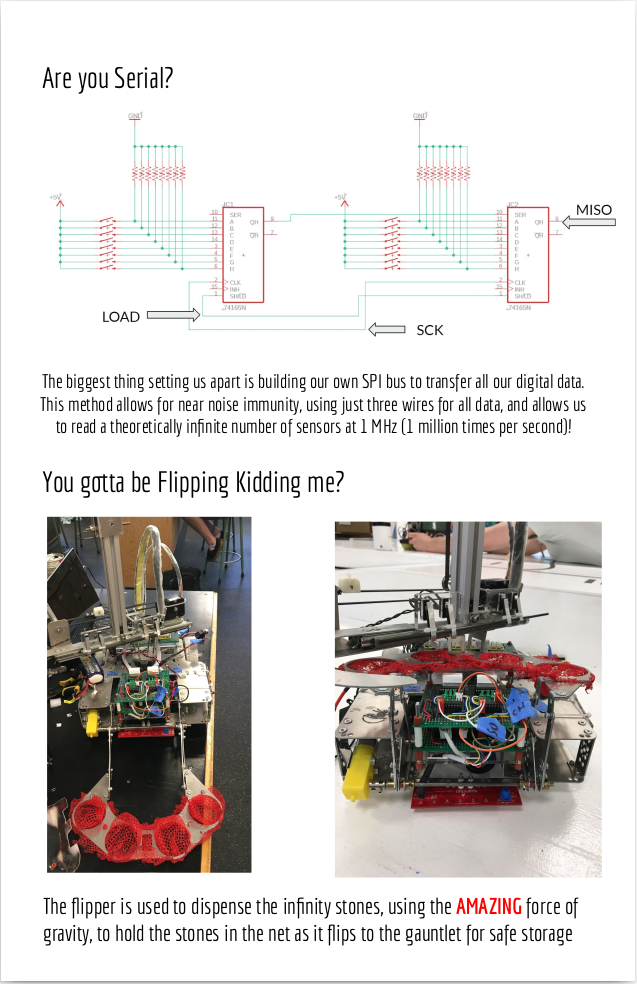
Flipper:
The flipper was used to store the infinity stones for safekeeping and then dispense them when the run was over at the gauntlet. it was designed with a four-link mechanism driven by a motor mounted on the chassis, it had netting that held the stones cradling them as it flipped keeping them from falling out.
Arm:
The arm was a successful failure. It was originally designed to be simple but we drastically underestimated the mechanical complexity of our design and we could have chosen a much better approach in hindsight. The original idea was to have every action of the robot to be controlled by limit switches and physical sensors, this way we could eliminate having to drive up to the poles and leave the tape track, additionally avoid false detections. Despite this failure, it was a massive success in learning how to improvise and work with stepper motors, linear actuators, controls, and mechanical design. (Plus it looked super cool)
The Team:
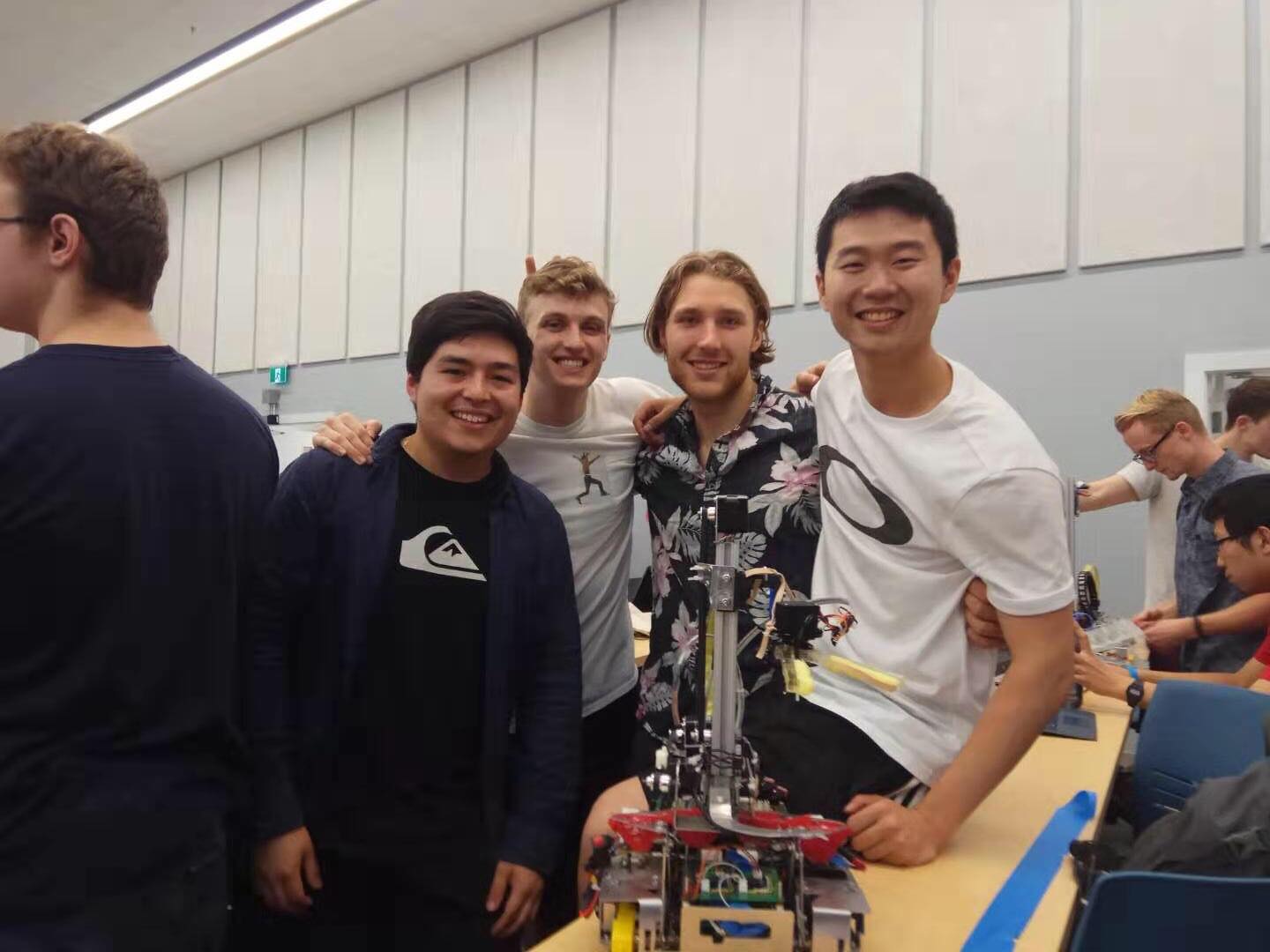
The team is seen on the left, we ain't the smartest, strong, or funny. Can't dance, can't swim, and all too fat to fly but we loved each other and as a team finished our project!
The Big Picture:
Competition results
The robot is working!!!

JK L00000L
Achievements
- Most hours spent on one issue: 1 week.
- Least amount of sleep: me.
- Most espresso shots: jason, 5 in a dark coffee.
- Hours awake no sleep: 69.